petrone_v2 for entry / Examples / Yaw rotation(Korean)
Modified : 2017.10.30
Yaw rotation(Korean)
Petrone V2의 Gyroscope sensor를 이용하여 원하는 각도와 속도만큼 드론을 제어하는 예제입니다.
원하는 각도와 회전속도 값을 입력받아야 하므로 함수를 사용했습니다.
정확한 제어를 위해서 변수와 조건문이 다소 사용되어 복잡하게 느껴질 수 있습니다.
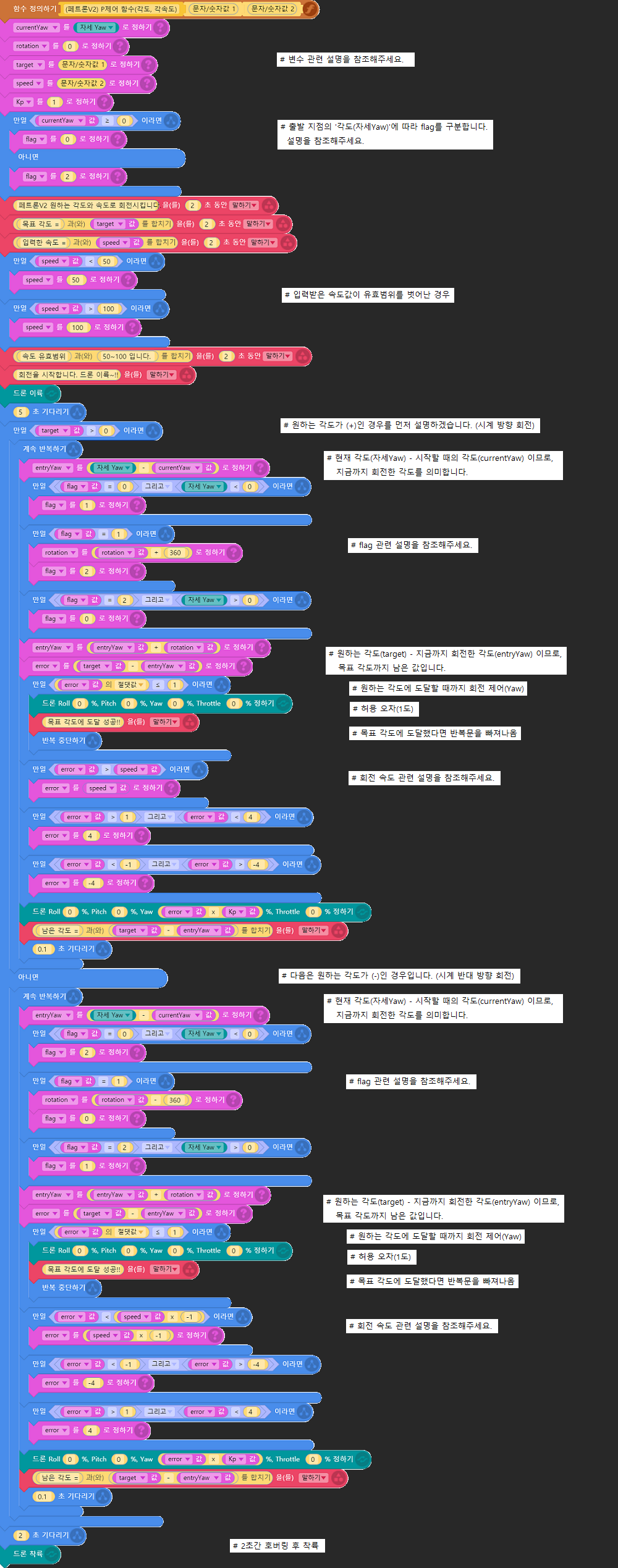
따라서 전체 블럭을 먼저 보여드린 후, 세부적인 설명을 아래부분에 추가하겠습니다.
변수 설명
이번 예제에서 사용된 변수들을 설명하겠습니다.
| 변수 이름 | 범위 | 설명 |
|---|---|---|
| currentYaw | -180 ~ 180 | 출발 지점의 '각도(자세Yaw)'값을 저장하는데 사용됩니다. |
| rotation | - | 자세Yaw 값이 180도 이상을(혹은 -180도 이하를) 넘어가는 경우에 계산하기 위해 사용됩니다. |
| target | - | 입력받은 값. 원하는 회전 각도입니다. (+ 시계 방향) (- 시계 반대 방향) |
| speed | 50 ~ 100 | 입력받은 값. 원하는 회전 속도입니다. (속도 유효 범위 변경 가능) |
| Kp | 1 | P제어(비례제어)의 매개변수입니다. 이번 예제에서는 1로 고정했습니다. |
| flag | 0 ~ 2 | rotation 값을 정확히 계산하기 위해서 사용됩니다. |
| entryYaw | - | 실제 회전한 각도입니다. (자세Yaw - currentYaw + rotation) |
| error | - | 목표 각도까지 남은 값입니다. 더 회전해야하는 각도입니다. |
flag
flag는 rotation 값을 정확히 계산하기 위해서 사용됩니다. 이러한 계산을 하는 이유는 드론이 실제로 회전한 각도를 정확히 알기 위해서입니다.
시계 방향 회전의 경우를 먼저 설명하겠습니다.
Petrone V2의 자세Yaw 값은 -180도에서 180도까지의 범위를 가집니다. 따라서 181도라는 자세Yaw 값은 없으며, -179도라고 표시됩니다.
이런 경우에 rotation이라는 변수를 사용하여 360도를 더해준다면, (-179 + 360 = 181) 우리가 얻고자 하는 값을 구할 수 있습니다.
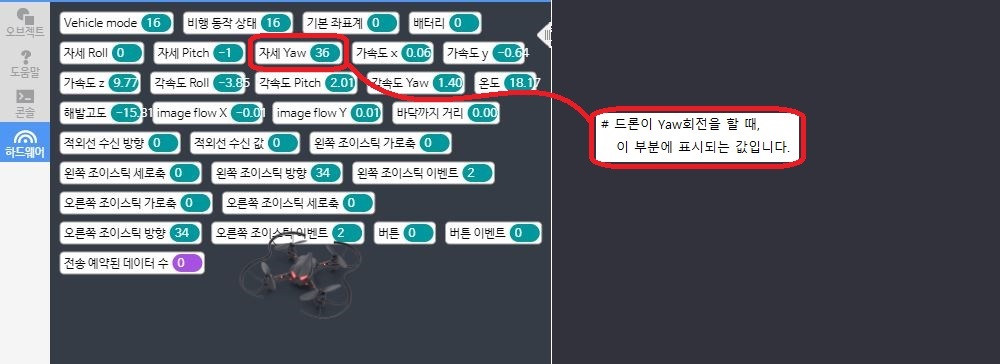
(엔트리 화면 좌측 하단에 있는 하드웨어 센서 창입니다. 이 부분을 확인하면서 보시면 도움이 될 것입니다.)
결국, 자세Yaw 값이 180도를 넘는 순간 (-) 값을 가지므로 360도를 더해줘야 하지만, 주의할 사항이 있습니다.
목표 각도까지 회전하기 위해서 '계속 반복하기'라는 반복문(무한루프)을 사용하고 있다는 점입니다.
'자세Yaw 값이 (-)일 때 360도를 더하라'라는 블럭을 만든다면 반복할 때마다 360도를 계속 더하게 될 것입니다.
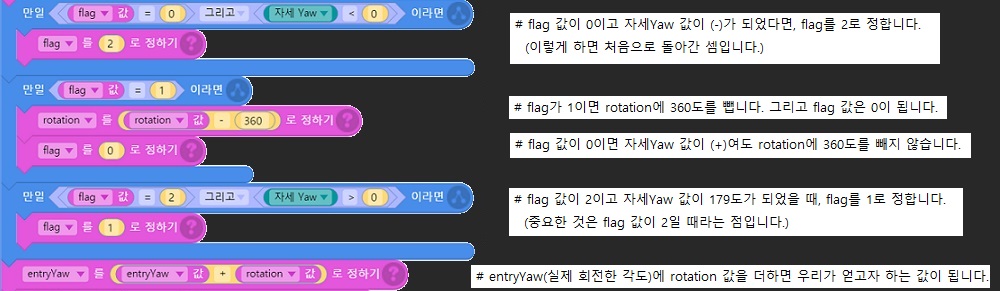
그래서 flag 변수를 사용하여 360도라는 값을 한 번만 더하게 만들었습니다.

그리고 중요한 사항이 하나 더 있습니다. 코딩에서 변수를 사용할 때 중요한 부분 중 하나는 '변수의 초기화' 입니다.
그래서 전체 블럭의 맨 윗부분을 보시면 이러한 블럭들이 있습니다. 만약 이 부분이 없다면 오작동이 일어나게 됩니다.

지금까지 시계 방향 회전의 경우를 알아보았습니다. flag와 관련된 부분을 처음 접해보셨다면 꽤 어렵게 느껴질 수 있습니다.
그런 점이 단점이라면 반대로 장점도 있겠죠? flag의 장점은 바로 강력한 기능성입니다.
앞으로 살펴볼 시계 반대 방향 회전의 경우에도 flag가 똑같이 사용됩니다. 시계 방향 회전에서 확실히 이해하셨다면 이번에는 쉽게 느껴질 것입니다.
다음은 시계 반대 방향 회전의 경우입니다.
앞에서 말한 바와 같이 Petrone V2의 자세Yaw 값은 -180도에서 180도까지의 범위를 가집니다.
따라서 -181도라는 자세Yaw 값은 없으며, 179도라고 표시됩니다.
이런 경우에 rotation 변수를 사용하여 360도를 빼준다면, (179 - 360 = -181) 우리가 얻고자 하는 값을 구할 수 있습니다.
결국, 자세Yaw 값이 -180도를 넘는 순간 (+) 값을 가지므로 360도를 빼줘야 하지만, 주의할 사항이 있습니다.
앞서 말한 것처럼 반복문(무한루프)을 사용하고 있다는 점입니다.
그래서 이번에도 flag 변수를 사용하여 360도라는 값을 한 번만 빼도록 만들었습니다.
그리고 '변수의 초기화'는 전체 블럭의 맨 윗부분에서 이미 실행되었으므로 다시 할 필요가 없습니다.
이것으로 flag와 관련된 설명이 끝났습니다. 수고 많으셨습니다.
rotation
rotation 변수를 사용해서 얻은 장점은 확장성입니다.
이 변수를 사용하기 전에 만든 알고리즘에서는 -360도에서 360도까지만 측정 가능했습니다.
하지만 이제는 360도를 넘어서 720도, 1080도, 1440도, 그 이상 무한히(배터리가 가능할 때까지) 측정 가능합니다.
또한, rotation 변수가 이렇게 큰 역할을 할 수 있는 것은 flag 변수 덕분이기도 합니다.
이번 기회에 두 변수의 사용법을 잘 이해하셨다면 앞으로 다양한 경우에 응용할 수 있을 것입니다.
speed
입력받은 회전 속도 값을 speed 변수에 저장합니다.
이번 예제에서 설정한 속도 유효 범위는 50 ~ 100 입니다. 범위를 벗어난 입력값은 자동으로 조정됩니다.
시계 방향 회전의 경우를 먼저 설명하겠습니다.
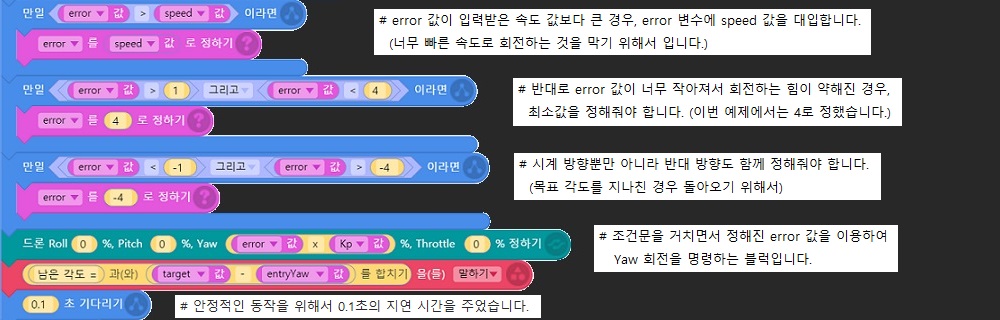
이번 예제에서는 Yaw 회전 속도를 error 변수로 제어합니다. 장점은 목표 각도에 가까워질수록 속도가 줄어들기 때문에 회전 동작의 안정성이 높은 것입니다.
error = target - entryYaw = 목표 각도 - 지금까지 회전한 각도 = 목표 각도까지 남은 값입니다.
다음은 시계 반대 방향 회전의 경우입니다.
회전 방향을 반대로 하기 위해서 speed 변수에 -1을 곱한 것 외에는 같습니다.
petrone_v2 for entry
- Examples - Bottom range(Korean)
- Examples - Bottom range(English)
- Examples - Yaw rotation(Korean)
- Examples - Yaw rotation(English)