petrone for python / Examples / Information
Modified : 2018.11.26
IMU 데이터 요청
IMU 데이터를 50ms 주기로 10회 요청합니다.
from time import sleep
from petrone.drone import *
from petrone.protocol import *
from petrone.system import *
def eventImu(data):
print("eventImu() / | Accel (X:{0:5}, Y:{1:5}, Z:{2:5}) | Gyro (R:{3:5}, P:{4:5}, Y:{5:5}) | Angle (R:{6:4}, P:{7:4}, Y:{8:4})".format(
data.accelX, data.accelY, data.accelZ,
data.gyroRoll, data.gyroPitch, data.gyroYaw,
data.angleRoll, data.anglePitch, data.angleYaw))
if __name__ == '__main__':
drone = Drone(True, True, True, True, True)
drone.setEventHandler(DataType.Imu, eventImu)
# Connect
drone.connect(flagSystemReset=True)
sleep(2)
if drone.isConnected():
for i in range(0, 10, 1):
drone.sendRequest(DataType.Imu)
sleep(0.05)
# Disconnect
print("Disconnect device.")
drone.sendLinkDisconnect()
sleep(0.2)
drone.close()
실행 결과는 다음과 같습니다.
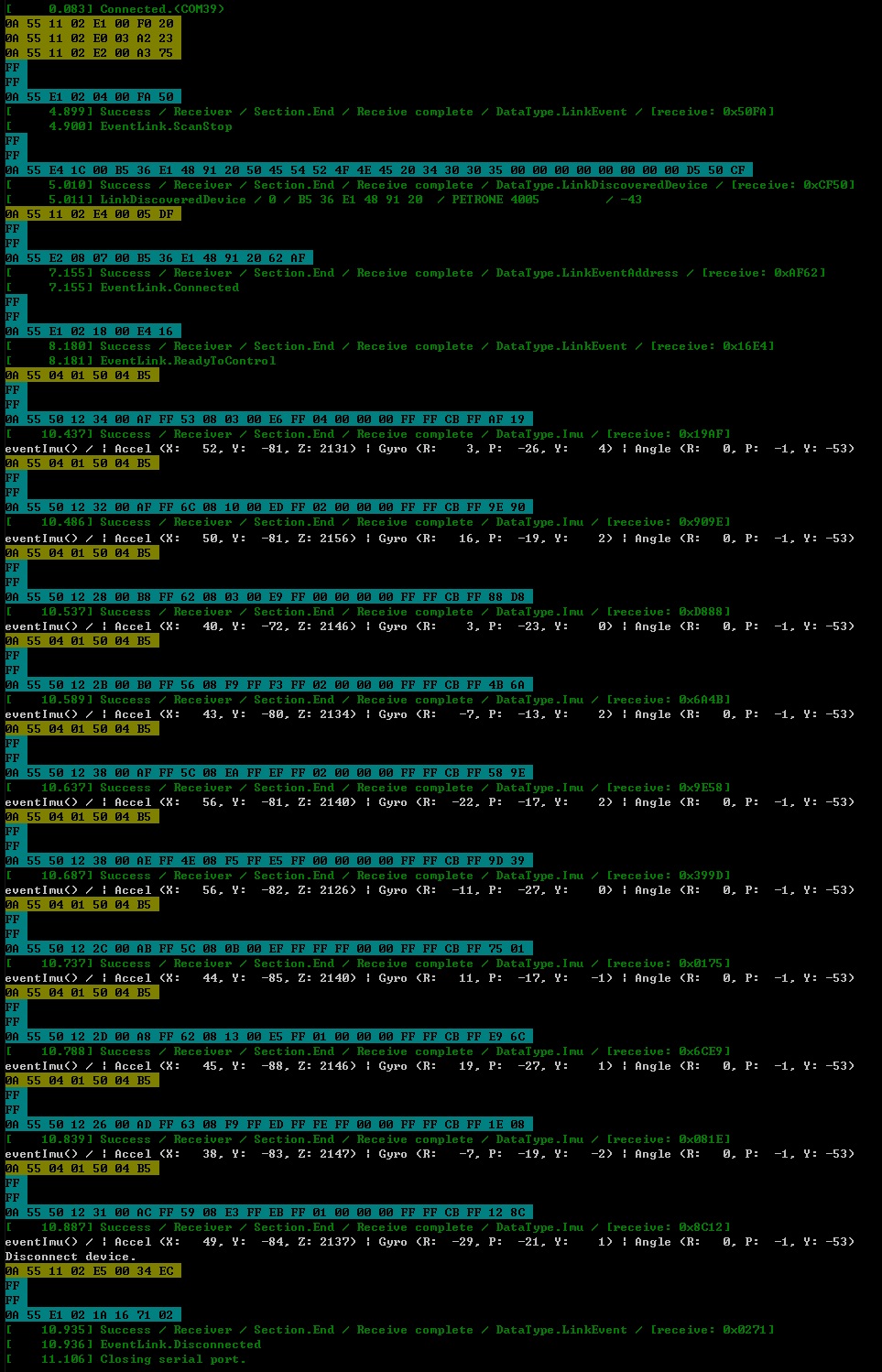
IMU 데이터 요청
petrone for python
- Intro
- System
- Protocol
- Drone
- Examples - Information
- Examples - Imu
- Examples - Test Flight
- Examples - Light